北京讯研科技有限公司©版权所有 京ICP备2022018930号-1

SeaStar360水下机器人(ROV)主要设计应用于长输隧道检测,机器人自带锂电池为动力,装备6个推进器,可以自主进行水中定向避障航行,可以控制前进,后退,横移,动作灵活,潜深300米,最大行进速度>3节,SeaStar360设计了安全拖缆的辅助方式,可以最大限度的实现安全可控的水下检测,自动收线方式卷盘,单次检测距离可以达到4000米以上。,配置了放线距离传感器:精度0.01米。
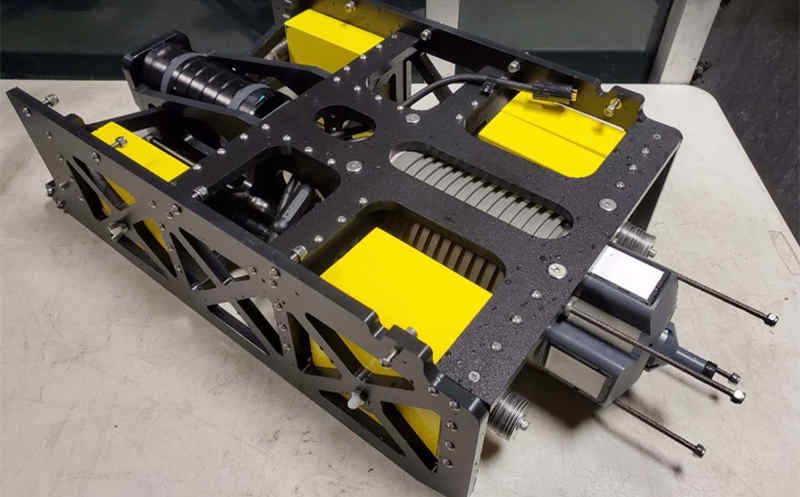
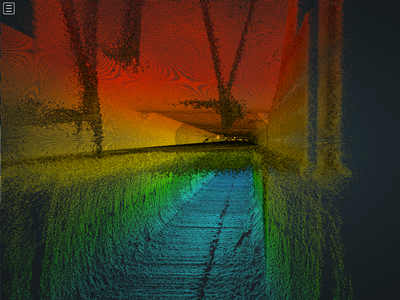
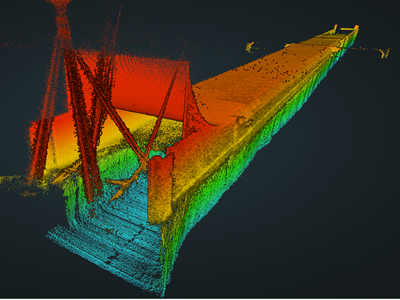
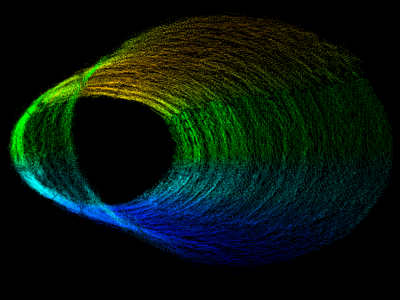
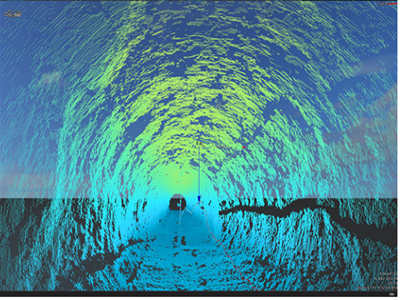
SeaStar360主要可进行视频及水下三维声纳的采集,搭载200万像素高清主摄像机1部,10倍光学变焦,辅助高清4倍变焦摄像机1部,主摄像机两侧同时挂载水下激光对比测量,可以测量目标物体的尺寸。SeaStar360搭载了水下三维扫描声纳,可以进行大断面(9米直径)隧洞的三维声纳扫测,精度最小可以达到2.0cm的分辨率,在疑似目标位置还可以辅助高清视频影像及激光测量进行补充。